Robotics Course (DL SMART-ROB)

PL-142565
The DL SMART-ROB is a software that has been developed to teach robotics with PLC in a unique and effective way. With this software, students can improve their individual experience on studying industrial robotics in practice.
Professors can explore this trainer to provide experiments to students with the following topics:
- Scara 2D robot: model, applications, classifications;
- Palletizing robot: model, applications, classifications;
- Direct kinematics: what it is and how to implement;
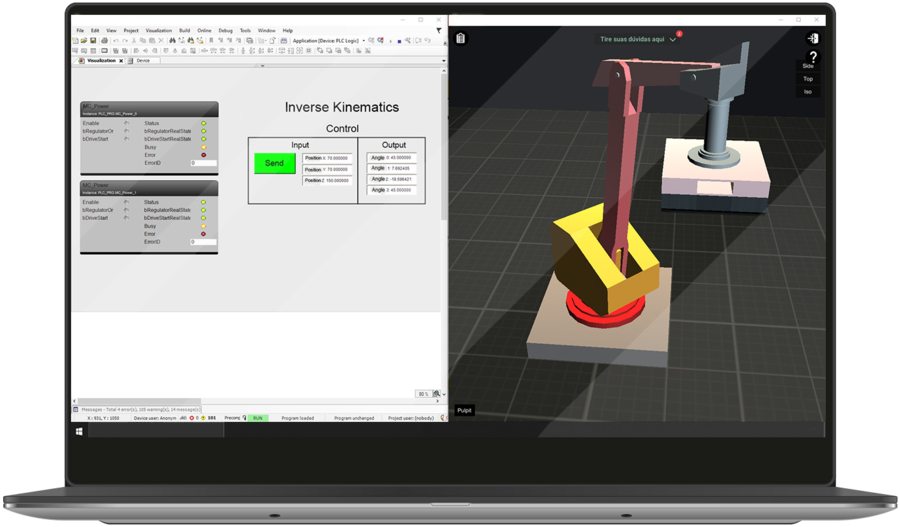
- Inverse kinematics: what it is and how to implement;
- Denavit-Hartenberg notation: what it is, how to apply and how to implement.
This software works integrated to Codesys Control (not included).
- DIRECT KINEMATICS
- INVERSE KINEMATICS
- HUMAN-MACHINE INTERFACE
- ROBOTICS INTRODUCTION
- FUNCTION BLOCKS
- CONTINUOUS FUNCTION CHART
- ROBOT CONTROLLER
- IT’S A 3D SIMULATOR
- IT HAS BUILT-IN PROJECTS
- THE PROJECTS INCLUDE GUIDANCE
- + CONTENTS AND SUPPORT MATERIALS, SO THEY CAN LEARN BY THEM
- IT AUTOMATICALLY CHECKS STUDENT ACTIVITIES TO LET THEY MOVE ON, LIKE IN GAME
- PROFESSORS CAN MONITOR STUDENTS, AND VERIFY WHICH POINT THEY NEED HELPOption available with Dashboard
- Each project has well defined goals and requirements.
- They are structured in tasks, and each task has specific requirements and provides instructions, contents and guidance to the students.
- When a student tests the developed solution and verifies that it meets the requirements, the student can deliver the task.
- When a student delivers a task, the SMARTSIM itself tests the student´s solution in real time and allows he/she to go to the next step.
Goal: Implement a solution to control the robotsmovement by defining the angles of the joints. Robotics concepts: kinematics.
Goal: Implement a solution to control the movement of a robot by defining the position of its endpoint. Robotics concepts: kinematics.
DENAVIT-HARTENBERT NOTATION
Goal: Use Denavit-Hartenberg notation in practice. Concepts of robotics: Denavit-Hartenberg method.
PATH PLANNING AND EXECUTION
Goal: Implement trajectory planning, storage and execution. Robotics concepts: direct and inverse kinematics and trajectory
With 3D industrial environments as well as integrated projects, you can develop solutions involving direct and inverse kinematics, trajectory planning and execution, Denavit-Hartenberg notation, and a lot more.
IT CONNECTS PROFESSOR, STUDENT AND SCHOOL
De Lorenzo´s cloud server receives students activities and provides reports and analytics to professors and institutions. Besides, a student can start working at school and continue at home or vice-versa. The platform includes a query and answer system that enables professors to support the students counting on a team of monitors. That means better support with less effort of the professors. The students can see questions asked by other colleagues too so that way if more than one student have the same doubt the professors answer will attend them all.
COMPATIBLE WITH THE DL SMART-DASHBOARD (SOLD SEPARETLY)
PROFESSORS CAN FOLLOW STUDENTS PROGRESS
The professor can do and access everything the student can. Besides, he/she can also access the dashboard’s portal. It includes interesting reports and analytics that help the professor to monitor the group in real time, as well as to identify students who are doing very well, as well as those who need help, who are not working at all and who seem to be “cheating”.
Tasks report
This is an important tool since it provides evidence of the activities a student worked on. That means the school has evidence of the practical activities the distance learner has done with detailed information about it.
PROFESSOR CAN SEE WHICH STUDENTS ARE ON SCHEDULE
With this interface, the professor may choose which groups he/she wants to monitor, to verify who is on schedule, who is pending and so on. It is possible to define the expected progress percentage in relation to the tasks available in the course.
RHYTHM
This other dashboard shows the number of activities the students did daily and weekly. The professor may decide to verify it regarding a whole group/class or a specific student.
EFFORT/TASK DEDICATED TIME
If the professor selects a student, he/she may verify how much time the student took to develop and deliver each task of the course.
PROGRESS VS TIME TAKEN
It is also possible to verify the distribution of the dedicated time with relation to the number of tasks done by each student at any period of time. That helps to identify who is doing well, who may need help, who is doing nothing and who is trying to cheat.
TRIALS PER TASK
This chart helps the teacher to understand which task may be the most difficult and which one may be the easiest in order to adjust the deadlines.
BUILT-IN PROJECTS, TASKS, INSTRUCTIONS, CONTENTS, AND AUTOMATIC VALIDATION
What is this?
These percentage scores are an average of 0 user reviews. To get more into detail, see each review and comments as per below
If you have used this product, support the community by submitting your review



